
Słysząc słowo „robot” zdecydowana większość z nas ma przed oczami jeden z dwóch obrazów. Pierwszy to scena z filmu Terminator, gdy T-800 ginie w płomieniach, a drugi obraz to 6-osiowy robot antropomorficzny.
 Nie ma w tym nic dziwnego, tego typu roboty są najbardziej uniwersalnym rozwiązaniem na rynku. Posiadają ogromną gamę zastosowań, takich jak spawanie, zgrzewanie, przenoszenie, dociskanie.
Nie ma w tym nic dziwnego, tego typu roboty są najbardziej uniwersalnym rozwiązaniem na rynku. Posiadają ogromną gamę zastosowań, takich jak spawanie, zgrzewanie, przenoszenie, dociskanie.
Jednakże w ostatnich latach na skutek kryzysu w dużej części firm nauczyliśmy się powtarzania niczym górskie echo jednego pytania – po co? Po co nam sześć osi, skoro operujemy tylko w trzech płaszczyznach? Po co nam obrót w pionie, skoro obracamy tylko w poziomie? Poniżej przedstawimy najpopularniejsze rodzaje robotów przemysłowych w zależności od liczby stopni swobody.
Roboty kartezjańskie
Roboty jednoosiowe i dwuosiowe mogą służyć zarówno jako jednostka niezależna, jak i zespół złączony w układ wieloosiowy. Tego typu roboty wykorzystywane są np. do pozycjonowania produktu na przenośniku taśmowym, odrzucania wadliwego produktu, czy samego przenoszenia produktu, w sytuacji, gdy nie ma potrzeby wykorzystywania większej liczby osi. Roboty tzw. 2,5D posiadają dwie osie jezdne oraz napęd pozwalający na regulowanie wysokości narzędzia. Wykorzystywane są np. do rzeźbienia w drewnie.
Roboty trójosiowe wykorzystywane są np. do procesu paletyzacji, pick&place lub wszelkiego rodzaju układów CNC. Jest to doskonałe rozwiązanie w przypadku, gdy nie ma konieczności obrotu względem osi poziomej. Roboty kartezjańskie (gantry) nie odstają pod względem szybkości ruchu od robotów antropomorficznych i wbrew obiegowej opinii wcale nie zajmują więcej miejsca (pamiętajmy, że roboty przemysłowe 6-osiowe muszą być i tak osłonięte klatką). Kolejną zaletą robotów kartezjańskich jest niewątpliwie „brak ciała”. Oznacza to, że przemieszczając końcówkę roboczą nie musimy omijać konstrukcji robota, przez co ścieżka ruchu staje się bardziej efektywna i precyzyjna. W zależności od technologii wykonania kartezjana (napędy z paskiem, czy śrubą) oraz dobranego napędu możliwe jest przenoszenie zarówno lekkich przedmiotów (jak korki butelek) jak i kilkusetkilogramowych betonowych płyt.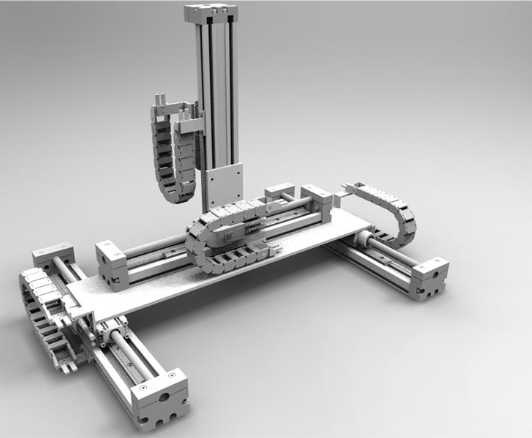
Podsumowując:
Zalety:
- Szybkość i dokładność,
- Szeroki zakres obciążeń uzależniony od budowy,
- Możliwość ruchu bez konieczności omijania ciała robota,
- Praktycznie nieograniczony zasięg.
Wykorzystanie:
- Pick&Place,
- Paletyzacja,
- Wszelkiego rodzaje układy CNC,
- Wszelkiego rodzaju aplikacje, w których wymagany jest ruch w osiach XYZ.
Robot typu SCARA
Roboty typu SCARA (jak na rysunku poniżej) podobnie jak roboty kartezjańskie operują w płaszczyźnie prostopadłej do podłoża. Ramiona robota obracają się względem siebie w jednej płaszczyźnie. Ich zaletą jest kompaktowa budowa, szybkość i dokładność. Doskonale radzą sobie z pakowaniem lekkich produktów jak korki od butelek, śruby, małe uszczelki.
Znajdują również zastosowanie w montażu elementów, czyli wszelkiego rodzaju precyzyjne operacje skręcania, wiercenia, gwintowania. Dzięki wyeliminowaniu drgań wynikających z hamowania pędu ramienia robot typu SCARA może wykonywać tak precyzyjne operacje jak montaż elektroniki, czyli przenoszenie bardzo małych podzespołów i lutowanie. Mimo niepozornego wyglądu SCARA jest ważnym elementem wielu linii.
 Podsumowanie:
Podsumowanie:
Zalety:
- Szybkość,
- Dokładność,
- Kompaktowa budowa.
Zastosowania:
- Pick&place,
- Montaż mechaniczny,
- Montaż podzespołów elektroniki,
- Wszelkiego rodzaju aplikacje, wymagające precyzji i działające w płaszczyźnie prostopadłej do podłoża.

